
El científico de Michigan Transductor de pulso de rueda de alta resolución (WPT) es un codificador óptico que se adhiere a las tuercas de la rueda de un vehículo. El WPT se usa comúnmente para rastrear la posición y velocidad de un vehículo para aplicaciones tales como administración de flotas y seguimiento de vehículos autónomos. Este caso de estudio demostrará la precisión de usar dos transductores de pulso de rueda juntos, comparando las mediciones de posición y velocidad con los datos del GPS.
¿Cómo funciona?
La señal del codificador se utiliza para calcular la posición angular y la velocidad de la rueda. Los datos registrados por dos WPT a cada lado del automóvil se pueden promediar para encontrar el centro, lo que brinda la representación más precisa de la distancia y la velocidad que ha recorrido el automóvil. Los vehículos de mapeo a menudo usan WPT para compensar las interrupciones en la señal del GPS, lo que permite rastrear la distancia recorrida durante la pérdida de señal. En este estudio, la alta resolución de los datos WPT funcionó mucho mejor que la del sensor GPS que se utilizó debido a su alta frecuencia de muestreo de 10,000 Hz.
Configuración de prueba
Para comparar los resultados del Wheel Pulse Transducer con los resultados del GPS, se conectaron dos sistemas WPT a un vehículo, uno en el lado trasero derecho y otro en el lado trasero izquierdo. Los transductores se montaron en las ruedas traseras para que el movimiento de giro de las ruedas delanteras no tuviera que compensarse en los datos. Se colocó un dispositivo GPS en la parte superior del vehículo, en el centro del techo sobre las ruedas traseras, donde daría la lectura más precisa. Las distancias y velocidades WPT izquierda y derecha se promediaron para que coincidieran con la señal GPS en el centro del vehículo. El curso de una milla de largo que se muestra a continuación, junto con un gráfico de latitud y longitud del GPS, incluye una maniobra de giro y zigzag.
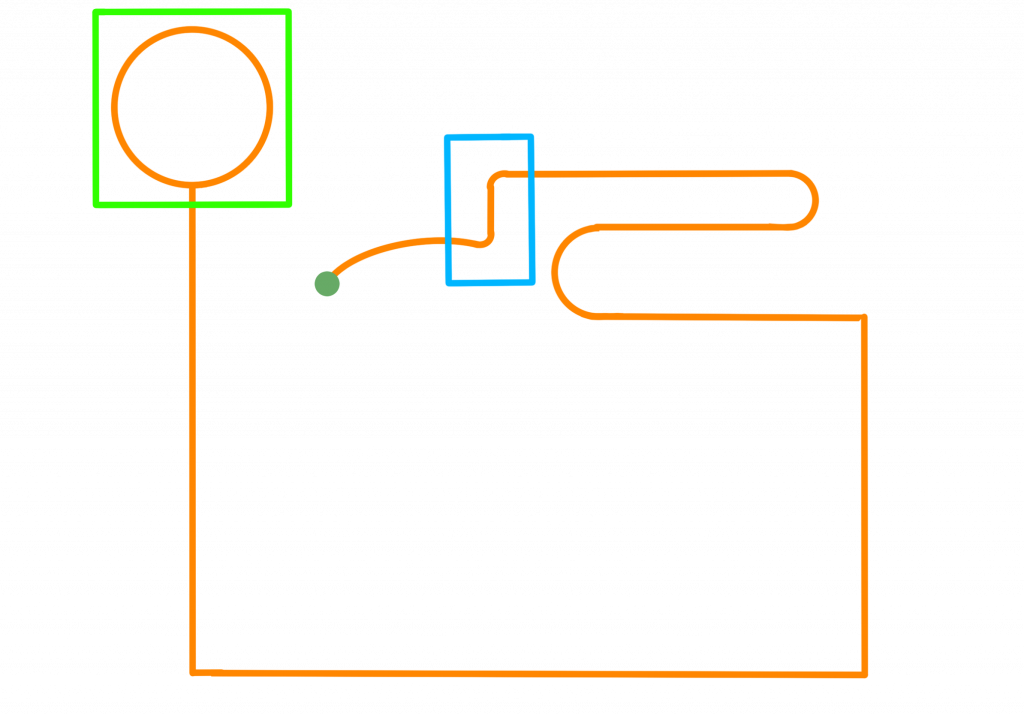
Esquema de la pista de prueba
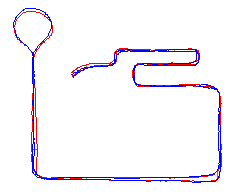
Datos GPS de la pista de prueba
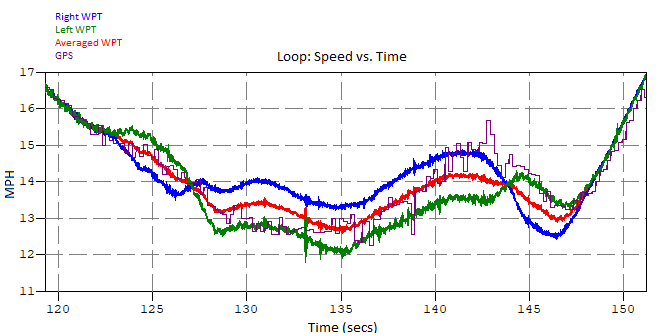
Red ISTE Loop
Al girar en el sentido contrario a las agujas del reloj alrededor de la parte circular de la pista de prueba (que se muestra en verde arriba), uno esperaría que la velocidad y la distancia de la rueda derecha mida mucho más alta que la izquierda. Al observar los datos, que se muestran a continuación, se descubre que esto es cierto. Las velocidades de la rueda derecha (azul) e izquierda (verde) se promedian (rojo) y se alinean casi perfectamente con los datos del GPS (violeta).
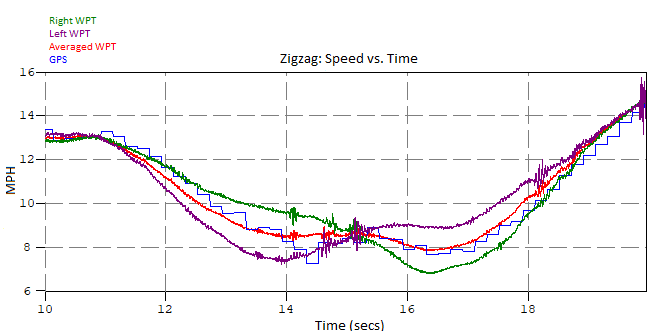
Camino en zigzag
El área que contiene un giro rápido a la derecha y a la izquierda, que se muestra dentro del cuadrado azul en el contorno de la pista de prueba, proporciona otra perspectiva interesante. Para la gráfica de velocidad a continuación, el vehículo se maniobró con un giro rápido a la izquierda y luego inmediatamente a la derecha. La forma de "W" creada por esto muestra que la rueda izquierda (violeta) fue más lenta que la derecha (verde) alrededor del giro a la izquierda, luego la izquierda fue más rápido que la derecha alrededor del giro a la derecha. Mientras que los dos lados opuestos intercambian lugares a lo largo de la maniobra, el promedio calculado (rojo) y los datos del GPS (azul) permanecen juntos en el medio.
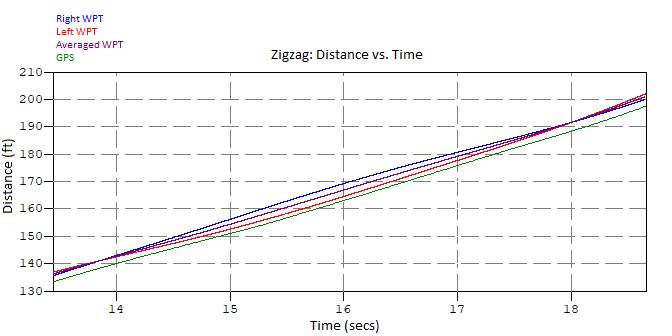
El tiempo entre los dos puntos de intersección en el gráfico a continuación es donde ocurrieron los giros a la izquierda y a la derecha. La rueda derecha (azul) supera a la rueda izquierda (roja) en distancia recorrida ya que tiene un radio mayor para dar la vuelta durante el giro a la izquierda, que comienza alrededor de 14 segundos y termina en aproximadamente 15.5 segundos. En este punto, la rueda derecha se ha desplazado más lejos que la rueda izquierda. El giro a la derecha comienza justo antes de los 17 segundos, y la rueda izquierda se pone al día con la rueda derecha cuando termina el giro, aproximadamente a los 18 segundos. La distancia promedio (violeta) recorrida permanece centrada entre los dos. Debido a que la pendiente de la distancia promedio y el GPS es la misma, todavía están registrando la misma velocidad y cambio en la distancia. Sin embargo, el GPS se está quedando unos metros detrás del volante, de ahí el ligero desplazamiento en los datos.
Error
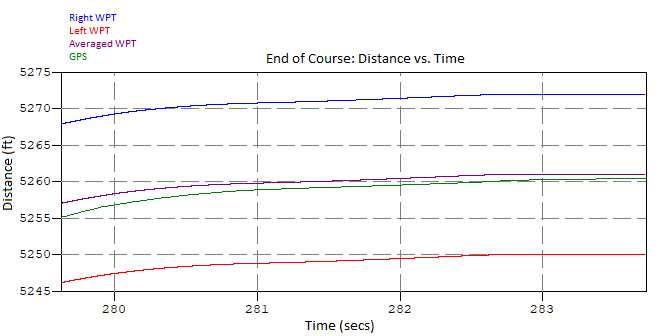
Los últimos puntos de datos de la prueba pueden mostrar los beneficios de usar dos WPT en lugar de solo uno. Si solo se usara un WPT, las distancias registradas tendrían un error máximo de 0.22%. Sin embargo, al instalar dos WPT y promediarlos, el error es solo 0.0115%, una disminución de un factor de 19. Esto muestra que el uso de dos transductores de pulso de rueda puede ayudar a reducir el error que se puede acumular en múltiples vueltas.
Esta prueba es solo una de una multitud de pruebas diferentes que utilizan transductores de pulso de rueda. Tener un sistema de medición duradero y preciso es beneficioso para rastrear con precisión la posición y la velocidad de un vehículo en cualquier entorno. Si desea hablar sobre su aplicación de prueba de ruedas, comuníquese con un representante científico de Michigan .